1、特点
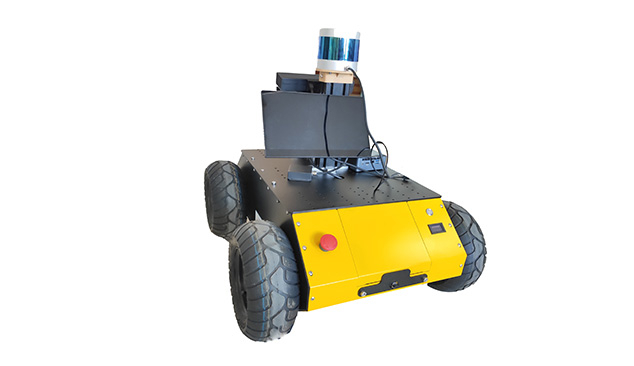
尺寸:81 cm(长)*67cm(宽)*33.5 cm(高)
驱动方式:差动同步四轮驱动
电机:直流无刷电机*2、额定功率:188w*2、编码器:2500线
运动能力:室外全地形,驱动轮直径:13寸(330mm),垂直越障能力5cm,爬坡能力20°,车身最小离地间隙100mm,直线移动最大负载不低于50kg,原地旋转最大负载不低于30kg,最大移动速度不低于1m/s,最大爬坡能力30°
运动控制板:STM32F407、电机伺服驱动器CAN总线
电源:24v/16Ah 可充电锂电池,连续运行时间大于四小时,电源输出接口:5v\12v\19v
通信接口:无线Wifi、串口USB-UART(RS-485)
其他功能配件:急停开关、电源开关、剩余电量显示屏、遥控器、可扩展支座、充电器;
功能扩展:
微型电脑:处理器 i7,内存8G,硬盘128G
显示屏:13.3英寸,可触摸,分辨率1920*1080p
深度相机:Kinect V2
IMU:AH-100B
激光雷达:URG-04LX-UG01
附带软件功能:具有语音交互、运动控制、自主避障、定位与导航、人机跟随,软件、算法提供开放的SDK、源代码和技术方案说明,供用户在C++/ROS中二次开发。